Wheelchair Assist Device
ENGG 4400 - Biomechanical Engineer Design
Jan. 2026 - April 2026
Description
Developed a retrofit assistive device to help manual wheelchair users safely navigate ramps by reducing the physical effort required for uphill motion and improving control. The system uses a motor-driven roller mechanism that transfers torque directly to the wheelchair wheels, assisting propulsion without altering the original wheelchair structure. A user-operated throttle enables real-time control of speed and assistive force, allowing smooth and intuitive operation on inclines.
The design was supported by mechanical analysis to determine system requirements, including approximately 29 N·m of wheel torque and 300–400 W power for effective ramp ascent, along with traction and clamp force considerations to prevent slip. The system was implemented using a 24V DC motor with a multi-stage gearbox to deliver torque through a roller-driven mechanism, integrating principles of mechanical design, power transmission, and electromechanical system integration. A user-operated throttle enables real-time control of speed and assistive force, while a front-mounted power switch provides accessible system activation and safety control during operation.
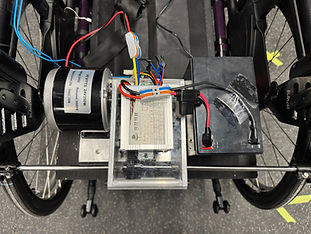
As shown in the portfolio images, the project includes a fully assembled prototype with integrated motor, gearbox, battery, controller, and roller system, detailed component-level views, and real-world ramp testing to validate performance under load. The device was successfully tested on inclined surfaces, demonstrating its ability to assist uphill motion and reduce user effort. The final system was developed as a low-cost, clamp-on retrofit solution (<$500), showcasing skills in prototyping, mechanical system design, electrical integration, testing and validation, and design for manufacturability, while significantly improving accessibility compared to existing commercial solutions.